Dnes chci představit další velký projekt, který se mi poštěstilo dokončit - topografickou mapu Venuše.
Už od té doby, co jsem publikoval
mapu Marsu, jsem věděl, že další mapa
bude (někdy) následovat. Měl jsem také tušení, že se bude týkat jednoho ze čtyř těles. Nakonec
"výběrové řízení" vyhrála Venuše. Důvodem je zejména možnost použití ucelených a v rámci možností finálních datasetů.
Při tvorbě marsovské mapy jsem nasbíral mnohé zkušenosti, které jsem využil u mapy Venuše. Dost věcí jsem nicméně dělal poprvé.
Jednou z hlavních novinek je použití v planetární kartografii hojně využívané kombinace Merkátorovy a polární stereografické projekce. Mapa je tak vlastně tvořena hned
třemi menšími mapami, jedné v Merkátorově projekci a dvou v stereografické projekci pro severní a jižní polární oblasti Venuše.

Mapa je založena převážně na datech z americké sondy Magellan, konkrétně z jeho radaru se syntetickou aperturou (SAR) a radarového výškoměru (Ford 1992a, 1992b, 1997),
ale při její tvorbě jsem také
použil data z pozemského radiolokátoru v Arecibu (Campbell 1990), americké sondy Pioneer Venus Orbiter (Ford 1988, Pettengill 1988) a v neposlední řadě i sovětských
sond Veněra 15 a 16 (Mitchell 2004). Jako podklad byly použity
topografické mapy z datasetu MGN-V-RDRS-5-GDR-TOPOGRAPHIC-V1.0 v nejnovější verzi GTDR3;2 (Ford 1992a) v kombinaci s radarovými mapami Venuše pořízenými přes online
rozhraní
Map-a-Planet.
Oproti marsovské mapě se tak nejedná o "čistou" topografickou mapu, založenou jen na výškových datech. Důvodem k tomuto kroku byla snaha o mapu, která by obsahovala
jak topografická data z výškoměru a měla přitom dostatečné rozlišení, aby do ní bylo možné umístit bez větších problémů všechny názvy útvarů na Venuši.
Všechny projekce map berou Venuši jako kouli o poloměru 6051 kilometrů, což je o trochu méně, než je aktuálně udávaná hodnota (6051,881 km) (Rappaport et al.
1999). Merkátorova mapa je v měřítku
1 : 7 000 000 (při tisku 72 DPI) při nejhorší rozlišení na rovníku ~2,47 km/pix a zobrazuje Venuši mezi 66,513° jižní a severní šířky. Tato projekce je dobrá pro
zachování tvarů. Nevýhodou je zvětšení obrazů útvarů ve vzdálenějších oblastech od rovníku. Při okrajích mapy na 66° stupni je tak rozlišení ~1 km/pix. Severní a jižní
polární projekce jsou v měřítku 1 : 5
000 000 (opět při 72 DPI) a zobrazují polární oblasti až po 60° severní, resp. jižní šířky. Rozlišení je 1,76 km/pix na pólech a stoupá k 1,64 km/pix na 60°.
Použité topografické mapy verze GTDR3;2 byly zpracovány pomocí programu MicroDEM, který umí pracovat s 16-ti bitovou hloubkou (narozdíl od minule použitého programu
Wilbur). Výsledkem zpracování byly dvě verze map. Jedna zobrazovala stínovanou mapu ve sníženém rozlišení pro lepší potlačení šumu v datech a zvýraznění velkých
topografických útvarů. Druhá v plném rozlišení verze GTDR3;2 (8192×4096) zobrazovala kombinaci stínové mapy a barevné výškové škály. Částečného snížení šumu bylo
dosaženo použitím mediánového filtru.
Barevná škála je nyní nastavena přesně na metry a jako nulová hranice je brán střední poloměr Venuše 6051,881 km. Barvy škály jsou inspirované jak pozemskými mapami
(modrá a zelená pro "hloubky"), barevnými snímky Venuše ze sovětských Veněr (hnědavé střední polohy) a hypotézami o horách pokrytými kovovým "sněhem" (kovově šedivá
nad 5 km). Protože výškové mapy z Magellanu nejsou kompletní, byly chybějící části vyplněny výškovými daty ze sondy Pioneer Venus Orbiter (Ford 1992b) a v severní
polární oblasti
také ze sond Veněra 15 a 16, konkrétně je použito topografické mapy, kterou vytvořil
Don P. Mitchell.
Tyto mapy byly sloučeny s mapami pořízenými radarem.
Radarové mapy jsou kompilací jednotlivých map z mapovacích cyklů 1 až 3, které prováděla sonda Magellan mezi léty 1990 až 1992. Část mezer byla vyplněna pomocí dat ze
sondy Pioneer Venus Orbiter (Ford 1988, Pettengill 1988) a radaru v Arecibu (Campbell 1990). Opět bylo u severních polárních oblastí použito dat ze sond Veněra 15 a
16. Protože nemám data z těchto sond v plném
rozlišení, jsou použita méně kvalitní data převzatá z mapy USGS (Batson et al. 1989).
Nakonec byly stínované topografické mapy sloučeny s radarovými mapami (s převrácenými hodnotami jasu) do finální verze.
Souřadný systém mapy je ve verzi VBF85, schválený IAU v roce 1985 (Ford 1992c). Nultý poledník prochází v tomto systému centrálním vrcholkem kráteru Ariadne o severní
šířce 43,8°.
 |
"Venera Land".
Glimpse of the new topographic map of Venus in full resolution. |
Všechny výškové údaje jsou vybrány z přibližně čtyř miliónů měření pořízených radarovým výškoměrem Magellanu (Ford 1992b, 1997). Výškoměr měřil vzdálenost povrchu
Venuše pod sebou a ze
známé polohy sondy je pak možné spočítat poloměr planety v místě měření a tedy i výšku terénu v daném bodě, vztaženou k nějaké hodnotě. Narozdíl od Marsu či Země je
Venuše velmi dokonalá koule a je tak možné výšková data pro topografii terénu vztáhnout přímo k údaji o středním poloměru (6051,881 km).
Narozdíl třeba od laserového výškoměru MOLA měl radarový výškoměr Magellanu velmi nízké rozlišení (Ford 1993). Každé měření je provedeno pro oblast s rozlohou 100 až
1000
km2 (záleží na výšce dráhy, nižší rozlišení bylo v polárních oblastech, lepší okolo rovníku). S tím jsou spojeny samozřejmě obrovské nevýhody, zejména co se
týče detekce menších topografických útvarů. Výhodou je zase pro změnu lepší pokrytí terénu, než laserového dálkoměru.
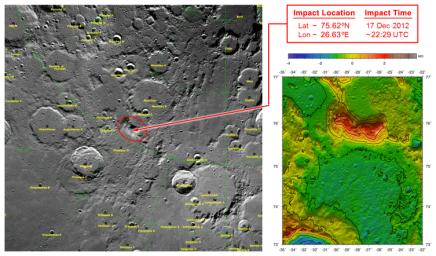
Data výškoměru Magellanu mají podobu časového záznamu odrazů rádiového pulsu s dálkovým rozlišením +/- 31,5 metru, který sám vznikl sumací několika jednotlivých
odrazů. Odraz
je možné zobrazit jako klasický graf s osami x a y (viz obrázek níže s příklady odrazů a vyznačenými šablonami). Na ose x je poté zaznamenán čas a
na ose y intenzita signálu.
Vzdálenost se ze zaznamenaného odrazu zjišťuje dvěmi základními metodami.
Jednoduchou metodou jak zjistit vzdálenost
tzv. detekce prahového signálu - prosté odvození výšky změřením času, kdy zesílený signál ohlasí přítomnost prvních odražených rádiových vln. Tento signál může být ale
velmi slabý a počítač jej může vyhodnotit chybně. Přesnější metodou je použití šablon spočtených pro různé terény, které poté počítač porovná s naměřeným signálem a
použije nejvhodnější šablonu. Tato metoda je například použita pro data tvořící podkladovou mapu verze GTDR3;2.
Ale i ona není spolehlivá na 100%. Naopak pro oblasti s extrémní topografií (hory, příkopy) dává často chybné hodnoty. Důvodem je samotný princip radarového
výškoměru. Pokud je po stranách měřené oblasti hodně útvarů, které dobře odrážejí rádiové vlny, může se stát, že do přístroje dorazí větší množství rádiové energie
právě od těchto útvarů a zmatou řídící jednotku přístroje. Počítač totiž mylně interpretuje výrazný vrchol v grafu zaznamenaného signálu jako povrch pod sondou,
zatímco méně výrazný vrcholek odpovídající skutečnému povrchu ignoruje. Vrchol odpovídající odrazu od bočních útvaru je dále na časové ose
x, což je situace
odpovídající menší výšce, než je skutečná (signál putuje do a z nížiny delší dobu).
Rozlišit, která data jsou v pořádku a která ne, není triviální problém. O tom nakonec svědčí i chyby v oficiálních topografických mapách, kdy jsou v hornatých
oblastech často z ničeho nic díry, které na snímcích z radaru nejsou.
Více se o radarovém výškoměru a jeho činnosti můžete dočíst třeba
zde (Ford
et al. 1993).
 |
Examples of altimetric echoes from surface of Venus. Image is taken from online publication Ford et al. (1993). |
Pro zjištění výškových dat pro mapu jsem zvolil několik řešení, které měly za cíl zvýšit pravděpodobnost, že se mi podaří vybrat tu správnou hodnotu pro výškový
extrém.
Za prvé: všechna nejasná měření jsou porovnána se záběry z radaru, zda terén v daném místě svědčí o
přítomnosti topografického extrému. Odhaduji, že takových případů bylo asi 40-50%. Díky aplikaci
Map-a-Planet je takové
ověření velmi rychlé.
Za druhé: každý topografický extrém je vybírán na základě více měření, pokud možno i více sekvencí měření (jeden oběh, jedna sekvence).
Za
třetí:
je použito obou variant měření, jak detekce prahové hodnoty (v mapě znázorněné trojúhelníkem s bílou hranou), tak měření pomocí srovnání se šablonou (jednoduchý černý
trojúhelník).
Údaje v případě detekce prahové hodnoty byly v AXF souborech chybné, byly totiž použity starší, méně přesné hodnoty, a proto jsem je opravil. Protože korekce se
týká hlavně vzdálenosti k povrchu Venuše, jednoduše jsem zjistil rozdíl mezi hodnotami zjištěnými metodou porovnání se šablonami pro starší datový soubor (Ford 1992b)
a pro nový datový soubor (Ford 1997). Pomocí této hodnoty jsem pak opravil prahové hodnoty.
Detekce prahové hodnoty byla brána jako řídící pro
všechna měření. To znamená, že data pro každou oblast byla srovnána dle výšek odvozených z detekce prahové hodnoty. Nicméně pokud byly rozdíly mezi opravenými
hodnotami zjištěnými prahovou detekcí a srovnáním se šablonami malé (do ~100 metrů), byla zpravidla dána přednost verzi se šablonou.
Za čtvrté: vhodnost měření byla posuzovaná dle velikosti tzv. indikátoru kvality,
který porovnává hodnoty odraženého signálu před a za detekovaným prahovým signálem a je udáván v jednotkách dB. Všechna měření musela mít tento poměr alespoň 2 pro
nížiny a 3 pro
vrcholky. S nižším číslem se zvyšuje riziko, že prahový signál je chybný.
Za páté: při měření pomocí šablon bylo přihlíženo ke koeficientu, který udává míru shody
zaznamenaného odrazu a šablony.
Za šesté: byla vyřazena měření, u kterých bylo uvedeno, že detekovaný práh je pravděpodobně chybný. Jedinou výjimkou v tomto případě
je
výška Maxwellova pohoří, kde jsem se tomuto vzepřel, protože vyřazeno bylo měření s velmi reálně vypadají hodnotou a velmi dobrým indikátorem kvality a navíc výborně
souhlasícím s daty stereosnímků (což už se nedá říct obecně pro další měření v dané oblasti).
Za sedmé: pokud to bylo možné, byla data porovnána ze stereosnímky povrchu. Jednalo se jak o více intuitivní porovnání pomocí prostého pohledu na stereo data nebo o
více sofistikované porovnání s nově zveřejněnými výškovými modely DEM, které vytvořil Robert Herrick se spolupracovníky (Herrick, Stahlke and Sharpton 2012).
Posledními údaji v mapě jsou znázorněná místa přistání (černý křížek) či dopadů (červený křížek) všech sond. Údaje o poloze jsou převzaty z publikace Ball et
al. (2007).
U sond, které dopadly na povrch se často jedná jen o místo vstupu do atmosféry, aktuální místo dopadu může být oproti udávanému údaji posunuto. Chybí Veněra 3, která
také zřejmě dopadla na povrch Venuše, ale díky tomu, že se odmlčela ještě před příletem k Venuši, je přesnější určení místa dopadu těžko možné.
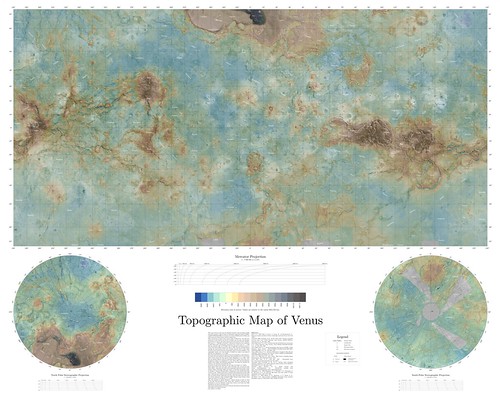 |
TOPOGRAPHIC MAP OF VENUS
Topographic map of Venus is now available at full resolution via Flickr. Image has 16,250×13,000 pixels and ~60 MB size. PDF version is also available here (~100 MB). |
Mapa je ke stažení přes poslední sadu obrázků a ke stažení jsou k dispozici dvě varianty. Jako JPG obrázek (16250×13000 pixelů, ~60 MB) a jako
PDF (~100 MB).
K závěru bych chtěl upozornit, že ačkoliv se k Venuši nechystá žádná sonda, která by v horizontu 10-ti let mohla přinést kvalitnější data, na základě kterých by se
tato mapa dala podstatněji vylepšit, doporučuji zájemcům se na tuto stránku sem tam podívat, protože obrovské množství dat, které na Zem odeslal Magellan
znamená, že ne všechna jsou v mapách použita (neplatí to jen pro tuto mapu), protože jednoduše došlo k jejich přehlédnutí. V blízké budoucnosti bych tato data rád
vyhledal a zakomponoval do mapy. Taktéž může dojít
k aktualizaci mapy kvůli přidání nových jmen na Venuši, ale k tomu nedochází ani zdaleka tak často jako u Marsu. Slibně vypadá i možnost použít výškové údaje z
digitálních modelů (Herrick, Stahlke and Sharpton 2012).
Také bych byl rád, kdyby mi laskaví čtenáři oznámili jakoukoliv chybu, kterou jsem v mapě přehlédl nebo udělal, ať ji mohu v pozdějších verzích opravit.
Na úplný závěr bych rád věnoval poděkování lidem, kteří mi pomohli s některými aspekty mapy a daty nutnými k její kompilaci. Dík patří samozřejmě všem, kteří se
podíleli
na misích sond Pioneer Venus Orbiter, Veněra 15 a 16, Magellan a také lidem od projektu planetárního radaru v Arecibu.
Speciální dík patří Donaldu P. Mitchellovi za jeho svolení s použitím jím vytvořené topografické mapy severního pólu Venuše z dat sond Veněra 15/16, dále profesoru
Peteru G. Fordovi za jeho pomoc s dekódováním binárních datových souborů výškoměru Magellanu a v neposlední řadě také Mikeovi Malaskovi za jeho pomoc s komunikací v
angličtině.
Základní údaje o mapě Venuše.
Basic information about Venusian map. |
| Projekce/Projection: | Merkátorova a polární stereografická/Mercator and polar stereographic. |
Měřítko (při 72 DPI):
Scale (at 72 DPI): | 1 : 7 000 000 (Mercator), 1 : 5 000 000 (polar stereographic). |
Rozlišení při 72 DPI (100%) na rovníku (resp. na pólech):
Resolution at 72 DPI on equator (on poles for polar stereographic): | 2,47/2.47 km/pix (Mercator), 1,76/1.76 km/pix (polar
stereographic) |
Systém souřadnic:
Coordinate System: | Planetocentrický
Planetocentric (IAU1985). |
Výšky vztaženy vůči:
Elevations referenced to: | Střednímu poloměru 6051,881 km/Medium radius 6,051.881 km). |
Typ licence:
Licence type: | Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License. |
Aktuální verze z:
Actual version of the map from: | 15.3.2013. |
Reference:
(Ball
et al. 2007) Ball, A., Garry, J., Lorenz, R., and Kerzhanovich, V., Planetary Landers and Entry Probes, Cambridge University Press, New York (2007).
(Campbell 1990) Campbell, D. B., Arecibo Venus radio telescope resampled 12.6 cm radar V1.0, NASA Planetary Data System, ARCB-V-RTLS-4-12.6CM-V1.0, vol. MG_1001, 1988.
Available via
http://pds-geosciences.wustl.edu/premgn/mg_1001/ebvenus/arecibo/.
(Ford 1988) Ford, P. G., P12 V orbiting radar derived backscatter cross section V1.0, NASA Planetary Data System, P12-V-ORAD-5-BACKSCATTER-V1.0, vol. MG_1001, 1988.
Available via
http://pds-geosciences.wustl.edu/premgn/mg_1001/pvvenus/radar/.
(Ford 1992a) Ford, P. G., Global Topographic Data Record (GTDR), NASA Planetary Data System, MGN-V-RDRS-5-GLOBAL-DATA-RECORD-TOPOGRAPHIC-V1.0, vol. MG_3003, 1992.
Available via
ftp://voir.mit.edu/pub/mg_3003/.
(Ford 1992b) Ford, P. G., Altimetry/Radiometry Composite Data Record (ARCDR), NASA Planetary Data System, MGN-V-RDRS-5-COMPOSITE-DATA-RECORD-ALT/RAD-V1.0, 1992.
Available via
http://ode.rsl.wustl.edu/venus/datafiles/mgn-v-rdrs-5-cdr-alt_rad-
v1/.
(Ford 1992c) Ford, P. G., ARCDRLST A Program to List Magellan Altimetry and Radiometry Composite Data Records, NASA Planetary Data System, MGN-V-RDRS-5-COMPOSITE-
DATA-RECORD-ALT/RAD-V1.0, 1992.
Available here
http://starbase.jpl.nasa.gov/mgn-v-rdrs-5-cdr-
alt_rad-v1.0/mg_2001/software/arcdrlst.txt.
(Ford
et al. 1993)
Ford, J.P., and 7 others, 1993, Guide to Magellan Image Interpretation: JPL Publication 93-24, 148 p.
Available here
http://history.nasa.gov/JPL-93-24/jpl_93-24.htm.
(Ford 1997) Ford, P. G., AXF files, 1997. Available via
ftp://voir.mit.edu/pub/mgn-axf.tar.gz.
(Herrick, Stahlke and Sharpton 2012)
Herrick, R. R., D. L. Stahlke, and V. L. Sharpton, Fine-scale Venusian topography from Magellan stereo data, EOS, Transactions, American Geophysical Union, 93, No. 12,
125-126, 2012.
(Mitchell 2004) Mitchell, D. P.,
Radio
Science
and
Venus,
Mentallandscape,
[cit.2013-03-15],
available
from
http://www.mentallandscape.com/v_radarmapping.htm.
(Pettengill 1988) Pettengill, G. H., P12 V orbiting radar resampled altimeter/radiometer V1.0, NASA Planetary Data System, P12-V-ORAD-4-ALT/RAD-V1.0, vol. MG_1001,
1988. Available via
http://pds-geosciences.wustl.edu/premgn/mg_1001/pvvenus/radar/.
(Rappaport
et al. 1999)
Rappaport, N. J., Konopliv, A. S., Kucinskas, A. B., and Ford, P. G., An improved 360
degree and order model of Venus topography, Icarus,
139, 19–31, 1999.
(Batson
et al. 1989) Batson, R. M., Basilevsky, A. T., Burba, G. A., and Head, J. W., Atlas of Venus 1:15000000 topographic series, northern hemisphere, plate
3, USGS IMAP: 2041, M(200) I no.2041.
Available via
http://pubs.er.usgs.gov/publication/i2041.




















{kind=link}
{kind=link}